Ob Greifen, Halten oder Drehen, Berühren, Tippen oder Drücken – im Alltag setzen wir unsere Hände selbstverständlich für die unterschiedlichsten Aufgaben ein. Die menschliche Hand ist ein wahres Wunderwerkzeug der Natur. Was liegt näher, als Roboter in kollaborativen Arbeitsräumen mit einem Greifer auszustatten, der diesem natürlichen Modell nachempfunden ist und durch künstliche Intelligenz lernen kann, eine Vielzahl von Greif- und Drehaufgaben zu lösen?
Verstärkungslernen: das Prinzip der Belohnung
BionicSoftHand verwendet die Methode des Verstärkungslernens – Das bedeutet, dass die Hand nicht eine konkrete Handlung imitieren muss, sondern nur ein Ziel erhält. Es versucht, dies durch Versuch und Irrtum zu erreichen. Basierend auf dem positiven und negativen Feedback optimiert die Hand schrittweise ihre Aktionen, bis sie die Aufgabe schließlich erfolgreich löst.
Digitaler Zwilling der echten Roboterhand
Insbesondere sollte die BionicSoftHand einen 12-seitigen Würfel so drehen, dass eine zuvor definierte Seite am Ende nach oben zeigt. Die notwendige Bewegungsstrategie wird in einer virtuellen Umgebung mit Hilfe eines digitalen Zwillings vermittelt, der mit Hilfe von Daten einer Tiefenmesskamera und den Algorithmen der künstlichen Intelligenz erstellt wird.
Schneller Wissenstransfer durch massiv paralleles Lernen
Das digitale Simulationsmodell beschleunigt das Training erheblich, insbesondere wenn man es multipliziert. Im so genannten massiv-parallelen Lernen wird das erworbene Wissen mit allen virtuellen Händen geteilt, die dann mit dem neuen Wissensstand weiterarbeiten; so wird jeder Fehler nur einmal gemacht. Erfolgreiche Aktionen sind für alle Modelle sofort verfügbar.
Nachdem die Steuerung in der Simulation trainiert wurde, wird sie auf die echte BionicSoftHand übertragen. Mit der virtuell erlernten Bewegungsstrategie kann sie den Würfel auf die gewünschte Seite drehen und andere Objekte in Zukunft entsprechend ausrichten. Auf diese Weise konnten Wissensbausteine und neue Fähigkeiten, sobald sie erlernt wurden, grenzenlos geteilt und weltweit verfügbar gemacht werden.
Pneumatische Kinematik mit 3D-Textilstrickware
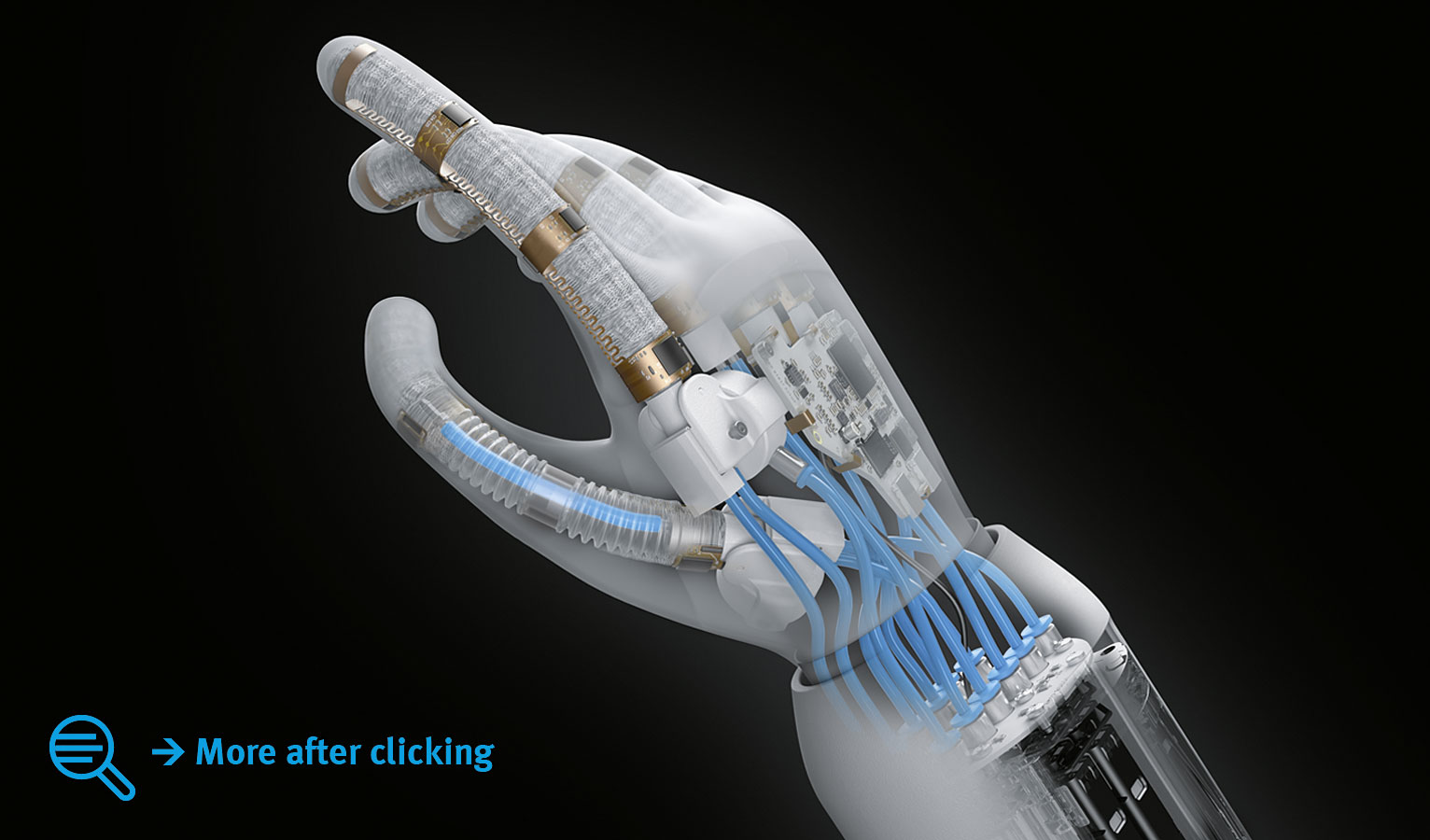
Im Gegensatz zur menschlichen Hand hat die BionicSoftHand keine Knochen. Er steuert seine Bewegungen über die pneumatischen Balgstrukturen in seinen Greiferfingern. Wenn die Kammern mit Luft gefüllt sind, biegen sich die Greiffinger. Sind die Luftkammern leer, bleiben die Greiffinger gestreckt. Daumen und Zeigefinger sind zusätzlich mit einem Schwenkmodul ausgestattet, mit dem diese beiden Greiferfinger seitlich bewegt werden können. Damit verfügt die bionische Roboterhand über insgesamt zwölf Freiheitsgrade.
Die Faltenbälge in den Greiferfingern sind von einer speziellen 3D-Textilhülle umschlossen, die sowohl aus elastischen als auch aus hochfesten Fasern gestrickt ist. So kann mit dem Textil genau bestimmt werden, an welchen Stellen sich die Struktur ausdehnt, wodurch Kraft erzeugt wird und wo sie nicht ausdehnt.
Whether grasping, holding or turning, touching, typing or pressing – in everyday life, we use our hands as a matter of course for the most diverse tasks. The human hand is a true miracle tool of nature. What could be more logical than equipping robots in collaborative working spaces with a gripper that is modelled on this natural model and can learn through artificial intelligence to solve a wide variety of gripping and turning tasks?
Reinforcement learning: the principle of reward
BionicSoftHand uses the method of reinforcement learning – learning by strengthening. This means that instead of having to imitate a concrete action, the hand is merely given a goal. It tries to achieve this through trial and error. Based on the positive and negative feedback received, the hand gradually optimises its actions until it finally solves the task successfully.
Digital twin of the real robot hand
Specifically, the BionicSoftHand should rotate a 12-sided cube so that a previously defined side points upwards at the end. The necessary movement strategy is taught in a virtual environment with the aid of a digital twin, which is created with the help of data from a depth-sensing camera and the algorithms of artificial intelligence.
Fast knowledge transfer through massively parallel learning
The digital simulation model accelerates the training considerably, especially if you multiply it. In so-called massively parallel learning, the acquired knowledge is shared with all virtual hands, which then continue to work with the new state of knowledge; so every mistake is made only once. Successful actions are immediately available to all models.
After the control has been trained in the simulation, it is transferred to the real BionicSoftHand. With the virtually learned movement strategy, it can turn the cube to the desired side and orient other objects accordingly in the future. This was how knowledge building blocks and new skills, once learned, could be limitlessly shared and made available on a global scale.
Pneumatic kinematics with 3D textile knitted fabric
Unlike the human hand, the BionicSoftHand has no bones. It controls its movements via the pneumatic bellows structures in its gripper fingers. When the chambers are filled with air, the gripper fingers bend. If the air chambers are empty, the gripper fingers remain stretched. The thumb and index finger are additionally equipped with a swivel module, which allows these two gripper fingers to be moved laterally. This gives the bionic robot hand a total of twelve degrees of freedom.
The bellows in the gripper fingers are enclosed in a special 3D textile cover which is knitted from both elastic and high-strength fibres. This means that the textile can be used to exactly determine at which points the structure expands, thereby generating force, and where it is prevented from expanding.