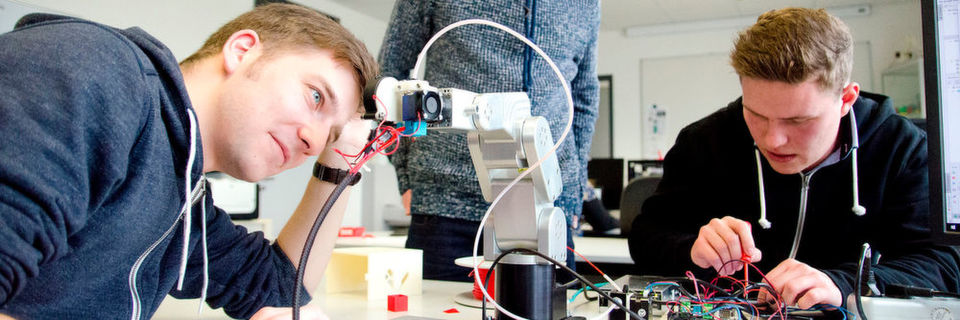
Maschinenbaustudenten der FH Münster haben einen sechsachsigen Roboterarm zum 3D-Drucker umfunktioniert. Damit ist es nun möglich, auch schräg zu drucken.
Die Maschinenbaustudenten der FH Münster Aaron Müller, Marius Artmann und Michael Koschny haben in einem Masterprojekt diesen neuartigen 3D-Drucker gebaut. Die Besonderheit: Die Basis des Druckers ist ein sechsachsiger Industrieroboter, sodass man wesentlich mehr Druckmöglichkeiten hat, zum Beispiel auch schräg drucken kann. „3D-Drucker können in der Regel nur drei Ebenen ansteuern“, erklärt Masterstudent Aaron Müller – sie fahren nach links, nach rechts und nach oben beziehungsweise unten. Mehr aber nicht. „Die Sechs-Achsen-Roboter sind in der Industrie längst Standard. Sie haben viel mehr Ansteuerungsmöglichkeiten und arbeiten unheimlich genau“, erläutert Artmann. Der Sechs-Achsen-Roboter ist ungefähr so beweglich wie der menschliche Arm, weshalb er auch den Spitznamen „Roboterarm“ trägt. Genau solch einen Roboterarm haben die Studenten zu einem 3D-Drucker umfunktioniert. „Damit schafft man einen großen Sprung in Sachen Einsatzmöglichkeiten“, so der betreuende Professor Dr. Eckhard Finke vom Fachbereich Maschinenbau.
Roboter und Extruder arbeiten synchron
Die Herausforderung des 3D-Druckers der nächsten Generation: Sowohl die Robotersteuerung als auch die Steuerung für den Druck müssen synchron sein, damit das zähflüssige Material aus dem Extruder, der es wie eine Heißklebepistole aufeinanderschichtet, richtig positioniert wird. Michael Koschny war bei dem Projekt für die Hardware zuständig. „Die muss zuerst stehen, damit wir dann daran arbeiten können, dass Roboter und Platine synchron angesteuert werden.“ Er entwarf die Bauteile in einem CAD-Programm, beschaffte und druckte die Teile und schraubte alles zusammen.
Müller und Artmann kümmerten sich derweil um den sogenannten G-Code. In ihm stehen alle Ansteuerungsbefehle für den 3D-Drucker. Die beiden Studenten schrieben eine Software, die den G-Code zusätzlich am Roboter umsetzt. Sie erkennt die Befehle und teilt sie dann den einzelnen Einheiten zu. So arbeiten Roboter und Extruder auch wirklich synchron.
Das Ergebnis: Der 3D-Drucker 2.0 kann jetzt Radien, viele kleine Linien, und sogar beschleunigt und verzögert drucken. Auch schräg von unten nach oben ist kein Problem. Extruder und Roboterarm fahren vollkommen synchron.
„So zu drucken, soll auch in der Industrie mehr und mehr kommen“, sagt Artmann. Mit ihrem neuen Drucker haben sie einen Grundstein für aufbauende Projekte am Fachbereich gelegt. Ideen kommen schon vom Team selbst: „Es wäre ja cool, wenn man auch seitlich drucken könnte …“
Students build a six-axis 3D printer that prints diagonally!
Aaron Müller, Marius Artmann and Michael Koschny, mechanical engineering students at Münster University of Applied Sciences, have built this innovative 3D printer in a master project. The special feature is that the printer is based on a six-axis industrial robot, which means that there are considerably more printing options, for example, diagonal printing. „As a rule, 3D printers can only control three levels,“ explains master student Aaron Müller – they travel to the left, to the right and up or down. But that’s all. „The six-axis robots have long been standard in the industry. They have much more control options and work incredibly precisely,“ explains Artmann. The six-axis robot is about as mobile as the human arm, which is why it is nicknamed the „robot arm“. It was exactly such a robot arm that the students turned into a 3D printer. „This is a great step forward in terms of possible applications,“ says the supervising Professor Dr. Eckhard Finke from the Department of Mechanical Engineering.
Robots and extruders work synchronously
Meanwhile Müller and Artmann took care of the so-called G-Code. It contains all control commands for the 3D printer. The two students wrote software that additionally converts the G-code on the robot. It recognizes the commands and then assigns them to the individual units. Robots and extruders really do work synchronously.
The result: The 3D printer 2.0 can now print radiuses, many small lines, and even accelerated and decelerated. Even diagonal from bottom to top is no problem. Extruder and robot arm are fully synchronized.
„To print in this way should also come more and more in the industry,“ says Artmann. With their new printer, they have laid the foundation stone for projects in the specialist area. Ideas are already coming from the team itself: „It would be cool if you could also print sideways …“.
Source: https://www.konstruktionspraxis.vogel.de/studenten-bauen-3d-drucker-der-schraeg-druckt-a-835482/